您现在的位置是:主页 > news > 泰州建站价格/人工智能培训一般多少钱
泰州建站价格/人工智能培训一般多少钱
![]() admin2025/4/24 11:48:18【news】
admin2025/4/24 11:48:18【news】
简介泰州建站价格,人工智能培训一般多少钱,企业网站开发主要职责,郑州启凡网络科技公司功能概述TCP轨迹跟踪功能是机器人在虚拟仿真环境中运行时,仿真软件对工具坐标系进行实时位置记录,然后把记录的每一个TCP位置点拟合成线条,并以具有明显特征的表现形式表现出来的一种功能。由于机器人的工具末端位置被实时地记录下来…

功能概述
TCP轨迹跟踪功能是机器人在虚拟仿真环境中运行时,仿真软件对工具坐标系进行实时位置记录,然后把记录的每一个TCP位置点拟合成线条,并以具有明显特征的表现形式表现出来的一种功能。
由于机器人的工具末端位置被实时地记录下来,因此TCP跟踪轨迹能够反映出机器人真实的运行轨迹,通常是一条直线或曲线。
通过对机器人TCP跟踪轨迹的分析,能够快速找到机器人运行过程中在完整的运行轨迹上与周边设备的碰撞干涉情况,帮助编程人员优化机器人运行路径程序,以及机械设计人员完善周边设备的结构调整。
在PDPS软件中使用“TCP Tracker”命令可以实现TCP轨迹跟踪功能,该功能适用于以下两种仿真场景。
活动工具:工具已安装在机器人上,并且加工的零件是固定不动的。在这种情况下,TCP轨迹跟踪功能会记录工具TCP相对于世界坐标系的运行轨迹。
固定工具(外部TCP):零件直接或间接地安装在机器人上,由机器人将零件移至安装在外部设备上的工具上实现加工。在这种情况下,使用TCP轨迹跟踪功能生成的机器人运行轨迹将被附加到零件上,如果零件在加工过程中发生移动,则曲线也会随之移动。
功能使用方法
在左侧的对象浏览树Object Tree中浏览到机器人资源并将其点选,然后在“Robot”菜单栏中的“Analysis”功能区域中点击“TCP Tracker”命令按钮,弹出TCP Tracker对话框。
在TCP Tracker对话框中可以点击“Select Color”按钮,在弹出的下拉菜单中对要生成的机器人TCP运行跟踪轨迹线条的颜色进行设置,如这里选择为红色,默认情况下颜色设置为白色。

运行测试
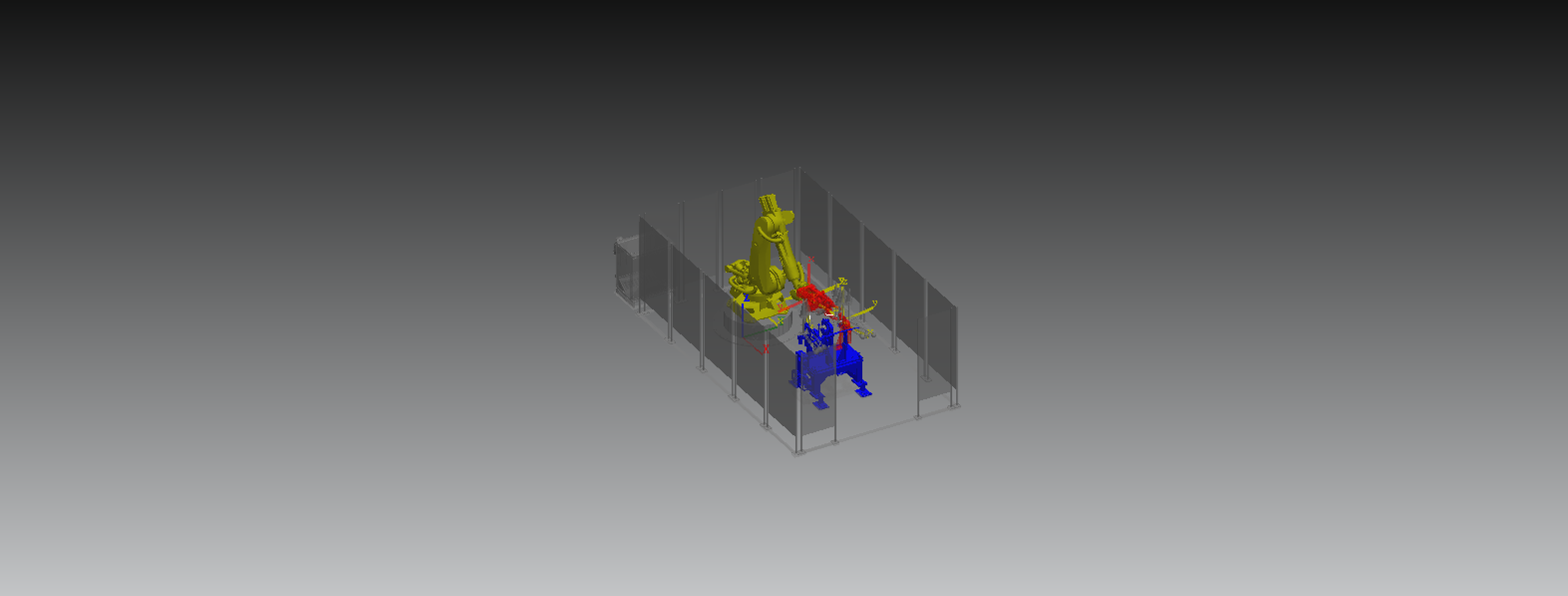
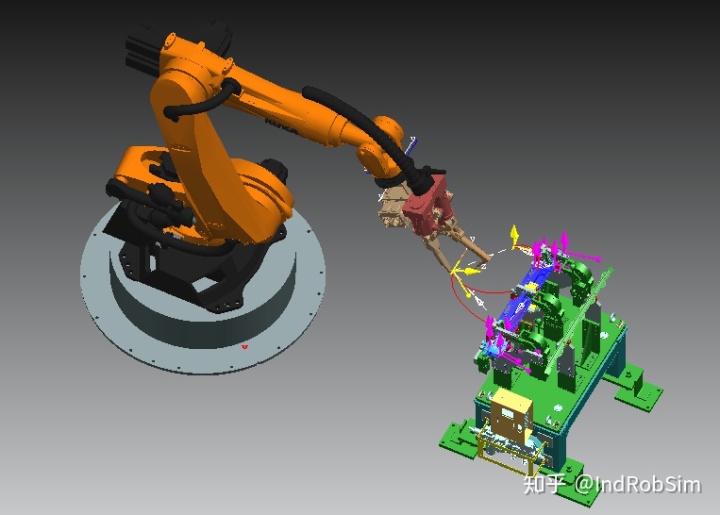
机器人TCP运行跟踪轨迹线条的颜色设置完成后,在路径编辑器Path Editor中运行机器人操作路径程序。可以看到机器人运行过程中,工具TCP坐标系原点随着位置的移动生成红色的跟踪轨迹。
机器人运行时在TCP Tracker对话框中点击“Pause”按钮,可以暂停生成TCP跟踪轨迹。同时,Pause按钮切换为“Record”按钮,点击此按钮后将继续生成TCP跟踪轨迹。
若是点击“Stop”按钮,则会立即停止生成TCP跟踪轨迹,并且关闭TCP Tracker对话框。
TCP跟踪轨迹说明
使用TCP Tracker命令进行机器人TCP运动轨迹跟踪之后,软件能够将记录的轨迹位置点两两之间拟合成一系列曲线,将这一系列的轨迹曲线组合起来就形成了完整的机器人TCP运行轨迹。
软件生成的一系列机器人TCP跟踪轨迹曲线文件被存储在左侧对象浏览树Object Tree根目录下的Curves文件夹中,对于活动工具的仿真情景,生成的跟踪轨迹文件结构如下图所示。
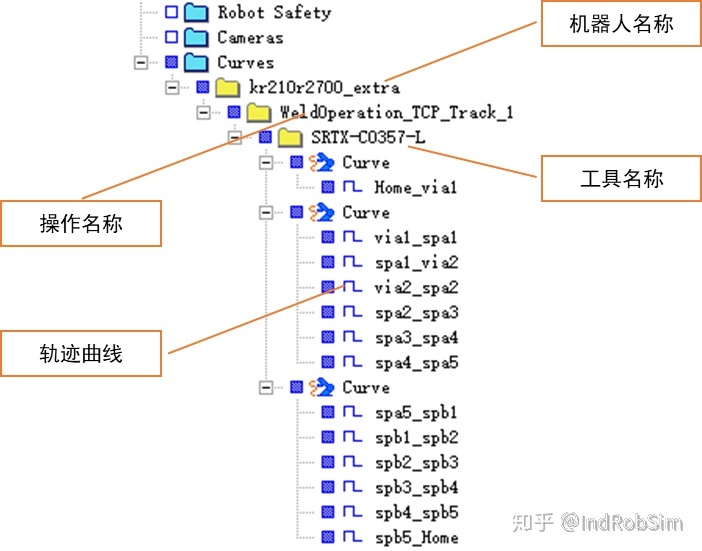
软件自动将生成的每条曲线按照一定的规则命名,命名规则:<运行起始点名称> _ <运行结束点名称>,如上图中的曲线Home_via1是机器人由Home点移动到via1过渡点时生成的TCP跟踪轨迹。这种命名方法,能够使仿真人员能够快速定位到机器人运行路径上发生碰撞干涉的轨迹点,大大提高了示教程序的优化效率。
通过点击相应的单个曲线文件名称,可以在软件工作区中高亮显示出对应的TCP跟踪轨迹曲线。

在左侧对象浏览树Object Tree根目录下的Curves文件夹中,右击机器人文件名称目录,在弹出的快捷菜单中选择“Delete”,可以对TCP跟踪轨迹进行删除操作。

The End
上一篇:
IndRobSim:PDPS软件:碰撞检测功能介绍与使用方法zhuanlan.zhihu.com